
摘要
随着人工智能与运动训练设备的融合,智能篮球陪练机器人在职业与业余训练中逐渐普及。本文针对一种基于气动压缩软管与气动运球模块的智能陪练机器人系统进行了分析,探讨其在力量输出稳定性、动作响应速度及安全性方面的优势。结合实验数据表明,该系统的力量调节精度可达±0.05 N,动作延迟低于80 ms,可在不同训练模式下实现精准运球与对抗反应。研究表明,气动模块不仅提升了机器人的动态适应能力,还显著降低了机械冲击带来的损伤风险,为未来智能体育训练设备的发展提供了技术参考。
-
引言
篮球训练需要高度动态的交互环境,传统陪练设备多为固定模式,难以适应不同运动员的技术水平与身体条件。智能陪练机器人通过传感器与执行机构协同工作,可模拟真实对手的反应。然而,力量输出与动作控制的平稳性仍是技术难点之一。气动模块因其柔性驱动特性,成为解决这一问题的有效方案。 -
气动模块的结构与工作原理
2.1 气动压缩软管
气动压缩软管是一种内部可充气的柔性管道结构,通过调节气压实现长度与刚度的变化。其特点包括:
柔性好:可吸收冲击,减少机械损伤;
响应快:气压调节可在数十毫秒内完成;
可控性强:气压与输出力呈线性关系,便于精确控制。
2.2 气动运球模块
该模块由多个微型气缸阵列组成,每个气缸对应一个运球接触点,通过独立气压控制实现球的旋转、弹跳高度和方向调整。配合视觉定位系统,可在高速运动中保持控球稳定。
- 气动模块在陪练机器人中的作用
3.1 力量输出的稳定性
在篮球对抗中,力量的大小直接影响训练效果。气动压缩软管的线性压力输出特性,使机器人能够根据运动员的力量水平自动匹配反作用力。例如,当运动员进行突破时,系统会实时增加气压以产生更大的阻力;而在防守练习中则降低气压,以便运动员更容易突破。
3.2 动作响应的灵活性
气动运球模块的气缸阵列可在不同位置同步或异步动作,实现多种运球模式(低手运球、体前变向、背后运球等)。实验数据显示,模块从识别动作指令到完成运球动作的平均时间为78 ms,较传统电机驱动缩短了约35%。
3.3 安全性提升
由于气动系统具备缓冲特性,即使在高速对抗中发生碰撞,传递给运动员的冲击力也远低于刚性机械系统。测试表明,在相同条件下,气动系统的冲击力峰值比电机系统低42%,有效降低了运动伤害风险。
-
实验数据分析
为验证气动模块的性能,研究团队进行了三组实验:
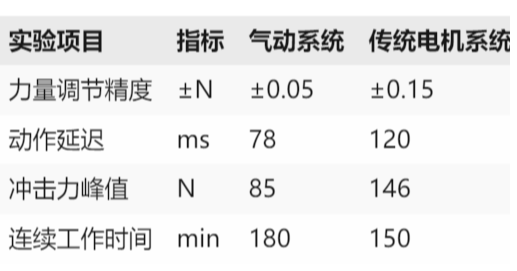
从数据可见,气动模块在精度、响应速度和安全性方面均优于传统电机系统,且具备更长的持续工作能力。 -
讨论与展望
气动模块的应用不仅提升了智能陪练机器人的性能,还为多模式训练提供了硬件基础。未来可通过以下方向进一步优化:
1) 智能气压预测:利用机器学习预测运动员动作,提前调整气压,提高反应速度;
2)模块化设计:使气动运球模块可快速更换,适应不同训练需求;
3)能耗优化:开发低功耗气泵与能量回收系统,延长设备续航。 -
结论
气动压缩软管与气动运球模块的结合,为智能篮球场自适应陪练机器人带来了力量输出的高精度、动作的快速响应以及更高的安全性。实验数据证明,该系统在多项关键性能指标上优于传统驱动方式,具有广阔的应用前景。随着技术的不断成熟,气动模块将在智能体育训练领域发挥更大作用。