
教程文档
0 主要功能与实际效果
本项用于电控教学, 内含若干大小技术点, 可使得新起步的队伍快速上手电控, 也可使得研发与传承困难, 技术积淀较少的队伍少走一定的弯路
1 教程概述
1.1 教程整体构成
配套教学视频
https://space.bilibili.com/337732684/channel/collectiondetail?sid=1043942
环境配置安装包
配套代码与其他相关资料 ( 内容完全一致, 根据网络状况酌情下载. 由于Gitee平台有容量限制, 但本仓库容量较大, 因此该项目于202308242000转移至Github以及中国科大Linux用户协会校内Gitlab平台中. 原Gitee链接仍有效, 只是不保持更新 )
GitHub - yssickjgd/robowalker_train: RoboMaster机甲大师机器人大赛中国科大RoboWalker战队电控组培训教学资料
配套PPT资料 ( 由于中国科大Rec网盘于20251201停止维护, 因此该项目于202506161600转移至中国科大新网盘科大云盘平台中. 原Rec网盘链接将失效 )
1.2 教程目录
标黄为已更新内容
- 电控 ( electrical )
- 电控简介 ( electrical_introduction )
- 电控导论
- 番外篇 如何去提问
- STM32CubeMX基础 ( stm32cubemx_basic )
- 环境配置与基础教学
- GPIO输出电压
- EXTI外部中断
- TIM定时器中断
- UART通信
- PWM呼吸灯
- ADC测电压
- 电机控制 ( motor_control )
- C++
- CAN通信
- CAN接口与大疆RM电机初步控制
- UART接口与串口绘图
- 串口绘图接口与电机反馈
- PID算法
- PID接口与电机闭环控制
- 电机接口与多环PID
- 动态目标与前馈PID
- 多电机控制
- 番外篇 达妙电机控制
- 番外篇 大疆电机进阶控制与相关库的累积更新
- 开发工具篇 ( develop_tools )
- Markdown基础教学
- Git基础操作教学
- CLion开发环境配置
- gcc, Make与CMake
- 番外篇 数学加速库arm_math.h的引入
- 番外篇 开发相关的官方软件与官方文档获取
- 番外篇 如何Debug
- 底盘篇 ( chassis )
- DR16与DT7遥控器模块
- 底盘概述
- 底盘的运动学与动力学解算
- 欧拉角与旋转矩阵
- 力补偿适配方法
- 功率控制前瞻
- 电机功率模型
- 功率控制策略
- 算法层的斜坡规划器
- 底盘小陀螺行进
- 底盘跟随行进
- 全向轮与麦轮适配算法
- 舵轮适配算法
- 操作逻辑
- 驱动层的看门狗
- 总结与致谢
- 番外篇 无功率反馈的缓冲能量功率控制
- 云台篇 ( gimbal )
- 云台概述
- 结合成品陀螺仪的云台控制
- 角度开环控制
- 操作逻辑
- 控制信号设定与云台自稳机制
- 阻力扭矩补偿、重力补偿与加速度补偿
- 异构型云台的控制
- 总结与致谢
- 发射机构篇 ( booster )
- 发射机构概述
- 算法层的有限状态机
- 发射机构控制
- 操作逻辑
- 卡弹处理算法
- 热量控制算法
- 无裁判系统的热量检测算法
- 总结与致谢
- 裁判系统 ( referee )
- 裁判系统简介
- 裁判系统环境搭建
- 裁判系统用户协议解析
- 双缓冲接收区与粘包处理算法
- 番外篇 计算机网络常识梳理-上篇
- 番外篇 计算机网络常识梳理-中篇
- 番外篇 计算机网络常识梳理-下篇
- 番外篇 校验算法与CRC校验
- 结语 ( conclusion )
- 电控结语
- 电控简介 ( electrical_introduction )
- 电控进阶 ( electrical_plus )
- 开篇 ( electrical_plus_introduction )
- 电控进阶导论
- 达妙板篇 ( damiao_mc02 )
- 达妙板与H7系列简介
- USB概述
- USB虚拟串口通信与接口
- Vofa+绘图工具
- FD_CAN通信与接口
- 达妙板RM电机的使用
- 达妙板达妙电机的使用
- SPI通信接口与WS2812自定义灯
- OSPI通信接口与W25Q64存储芯片
- 观测器篇 ( observer )
- 观测器概述
- 频选滤波器前瞻
- 频选滤波器之卷积与系统论基础
- 频选滤波器优化电机电流值
- 频选滤波器之原理篇
- Kalman滤波前瞻
- Kalman滤波器之概率论基础
- Kalman滤波器之矩阵分析基础
- Kalman滤波器优化电机反馈速度
- Kalman滤波器之原理篇
- 频选滤波器与Kalman滤波器的对比
- 番外篇 频率的形象化理解
- 番外篇 Joseph形式更新协方差矩阵
- 番外篇 扩展Kalman滤波器
- 陀螺仪IMU篇 ( gyroscope )
- IMU概述
- IMU接口与读写调度器
- 欧拉角与旋转矩阵的补充
- 旋转向量的轴角法与旋转矩阵
- 四元数与旋转矩阵
- 六轴陀螺仪IMU姿态解算概述
- EKF实现六轴陀螺仪IMU姿态解算
- 陀螺仪适配算法
- 总结与致谢
- 番外篇 复数的引入
- 控制器篇 ( controller )
- 控制器概述
- LQR控制器前瞻
- LQR控制器之系统建模基础
- LQR控制器控制双轴云台
- LQR控制器之原理篇
- 轮腿机器人篇 ( wheel_legged )
- 轮腿机器人概述
- 轮腿底盘的运动学与动力学模型
- 轮腿底盘的LQR控制器构建
- 轮腿机器人的适配算法
- 总结与致谢
- 超级电容篇 ( supercap )
- 超级电容概述
- 超级电容通信接口与策略
- 总结与致谢
- 自瞄篇 ( autoaiming )
- 自瞄系统概述
- 自瞄系统通信接口与策略
- 总结与致谢
- 组别合作 ( cooperating )
- 组别合作导论
- 机械组工作内容
- 硬件组工作内容
- 视觉算法组工作内容
- 宣传运营组工作内容
- 番外篇 电机模块选型经验分享
- 番外篇 Solidworks建模经验分享
- 番外篇 拓竹3D打印机使用经验分享
- 番外篇 嘉立创EDA基本操作教学
- 番外篇 宣传平面设计经验分享
- 番外篇 技术评审视频经验分享
- 番外篇 直播推流经验分享
- 开篇 ( electrical_plus_introduction )
1.3 教程开发环境
本教程内含两套开发环境, 且均有完整的环境配置教学视频, 详情可查找目录
- Keil环境
- 该环境较为简单, 初学者易于上手
- 环境配置教学位于目录中 [1_电控]->[2_STM32CubeMX基础]->[1_环境配置与基础教学] 部分
- 第二, 三章节, 即STMCubeMX基础章节与电机控制章节, 此部分内容较为基础, 因此基于该环境进行开发
- CLion环境
- 该环境需要开发者手动配置内容较多, 如若想完全理解配置过程, 则需C语言以及ARM开发基础. 与此同时, 该开发环境功能更加优越, 相比Keil, 其代码提示更加智能, 且多线程编译使得编译速度大大加快
- 环境配置章节位于目录中 [1_电控]->[4_开发工具篇]->[3_CLion开发环境配置] 部分
- 第四章节及后续上手对整个步兵机器人进行开发时, 本教程将主要采用该环境进行开发
1.4 教程特色
教程内含海量图片, 如流程图, 电路图, 用户手册重要部分的截图等内容进行辅助讲解. 与此同时, 教程也会细致介绍每个技术细节的工程原理, 通过工程师的"测试->思考->迭代"思维进行教学与思维训练
-
照顾新手. 本教程仅需C语言基础即可上手, 其它任何所需的前置知识均有所提及
- 如电机控制部分, 将会引入C++相关内容
- 在底盘篇及其后续内容, 将会频繁用到Markdown笔记, 因此本人也对Markdown进行了细致讲解
- 在引入新的开发环境后, 由于大多数学校的C语言并未细致讲解gcc以及相关编译知识, 因此本人对编译的原理进行了相应的讲解
- 在底盘篇及其后续内容中, 由于频繁涉及了坐标系转换, 但考虑到RM电控同学可能未学过机器人学等相关内容, 且数学基础也仅限于一般的线性代数基础, 因此本人对欧拉角与旋转矩阵等概念也进行了细致讲解
-
理论实践相结合, 穷究原理洞悉本质. 这也是我校校训"理实交融"的印证. 本教程每个工程实践部分, 均有前置背景知识的回顾与铺垫, 以及理论讲解作为引导, 且尽量避免硬调参, 盲调参的现象, 尽可能通过建模来进行更好的控制
- 如单片机教学部分, 本人会在每一小节进行讲解该外设的实现原理, 而后才会进行嵌入式实验
- 如电机控制部分, 本人从CAN通信原理开始讲起, 接下来是PID算法教学, 而后才进行对开环控制, 角速度闭环控制, 角度环双环闭环控制, 前馈控制等相关内容逐步讲解, 环环相扣
- 如底盘控制部分, 本人带电控同学们了解了旋转矩阵的相关原理, 还在功率控制部分温习了泰勒展开的相关知识, 切实做到了理论指导实践
-
测试, 思考, 迭代的三个过程环环相扣, 充分体现了工程师思维. 通过各种测试发现问题, 引入解决方案. 下举一小部分示例说明
- 如底盘篇
- 从小陀螺行进走偏引入底盘小陀螺角速度前馈等
- 如云台篇
- 从云台电机响应差的现象分析, 得出云台角速度反馈精度低的结论, 从而通过利用陀螺仪反馈云台角速度来解决该问题
- 从云台会随底盘小陀螺以及上下坡运动, 操作手体验不佳的测试现象分析, 从而引出了云台自稳的概念
- 如底盘篇
-
由浅入深, 循序渐进, 不止基础, 引人入胜. 本教程虽然面向新队员, 但与此同时也不乏高技术含量与新颖的内容. 这些内容也无不透露着RM"穷究原理洞悉本质"的口号
- 如底盘篇的功率控制算法, 本人从轮速闭环搭配限流的传统底盘控制与功率控制算法出发, 经测试发现其功率利用率低,通过一系列的分析,从而引出了力控底盘, 底盘的动力学解算以及电机建模与功率闭环控制等相关概念, 且在RMUL2025山东站青工会分享以及各大群聊中, 引起了一众RMer的讨论与交流
- 如云台控制部分, 本人分析了传统双轴云台的运动学特征, 并在此基础上完善了三轴云台的控制策略. 本人也对双枪云台的干涉问题进行了一定的分析与讲解. 与此同时, 我队的薛佳龙同学, 针对本人双轴云台控制算法有待完善的部分提出了双稳云台的概念, 将传统云台相对于底盘坐标系控制转为大地坐标系下, 将云台的Yaw和Pitch解耦, 大幅提升了自瞄系统的云台跟随性能
-
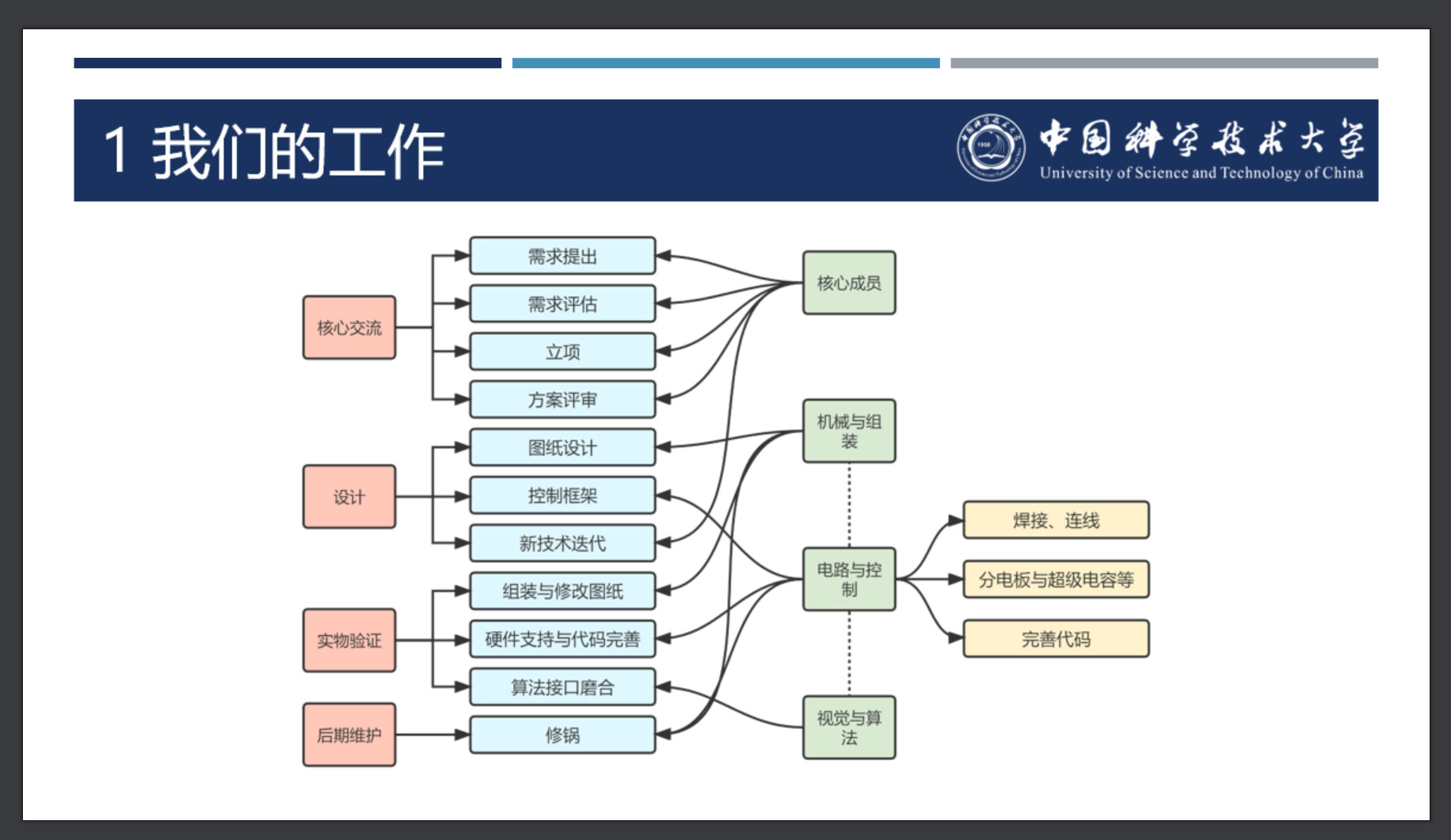
图文并茂. 对必要部分进行电路图, 流程图, 框架展示说明等内容的展示
-
本图片摘自 [1_电控]->[1_电控简介]->[1_电控导论] 部分
-
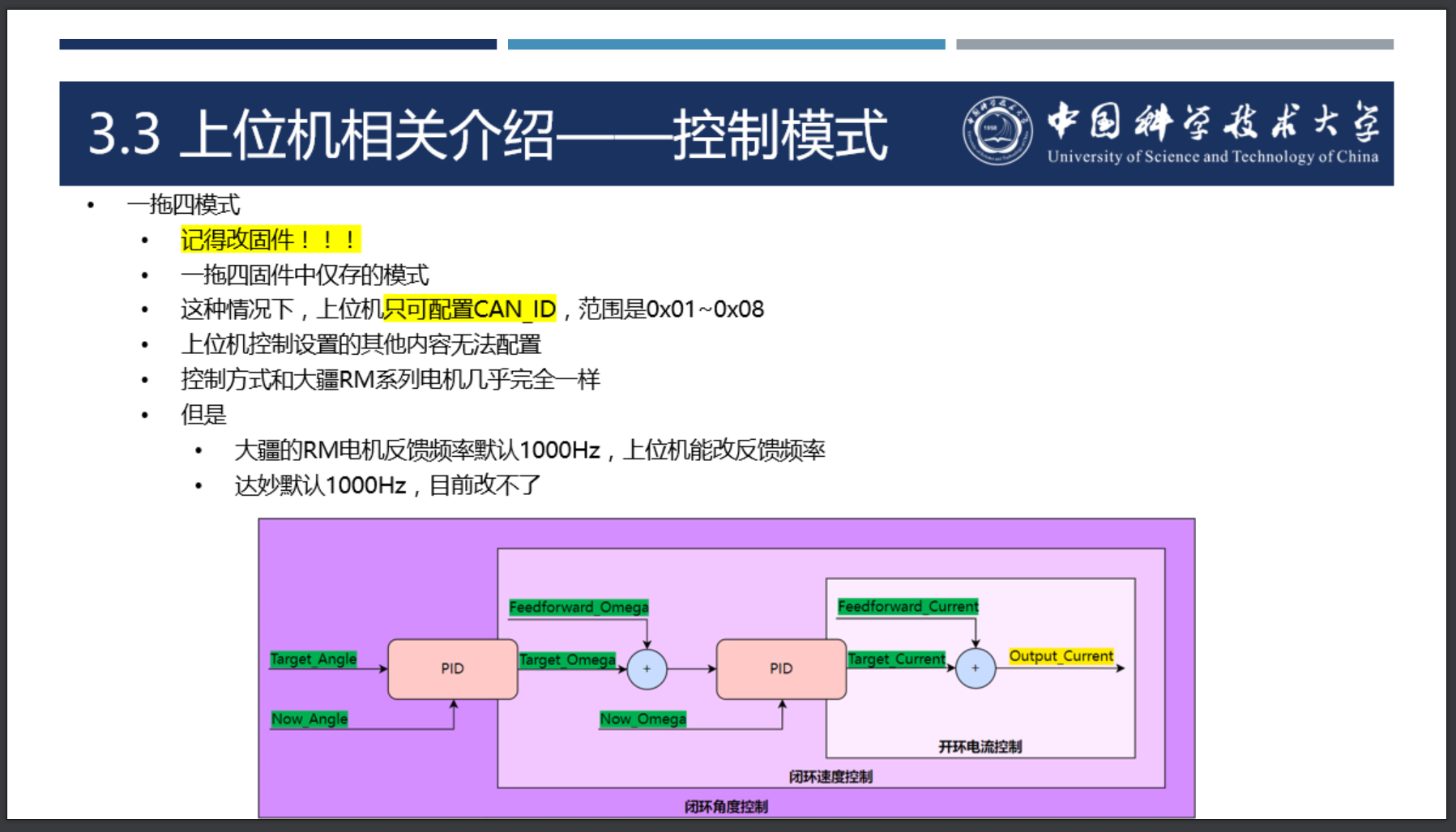
本图片摘自 [1_电控]->[3_电机控制篇]->[12_达妙电机控制] 部分
-
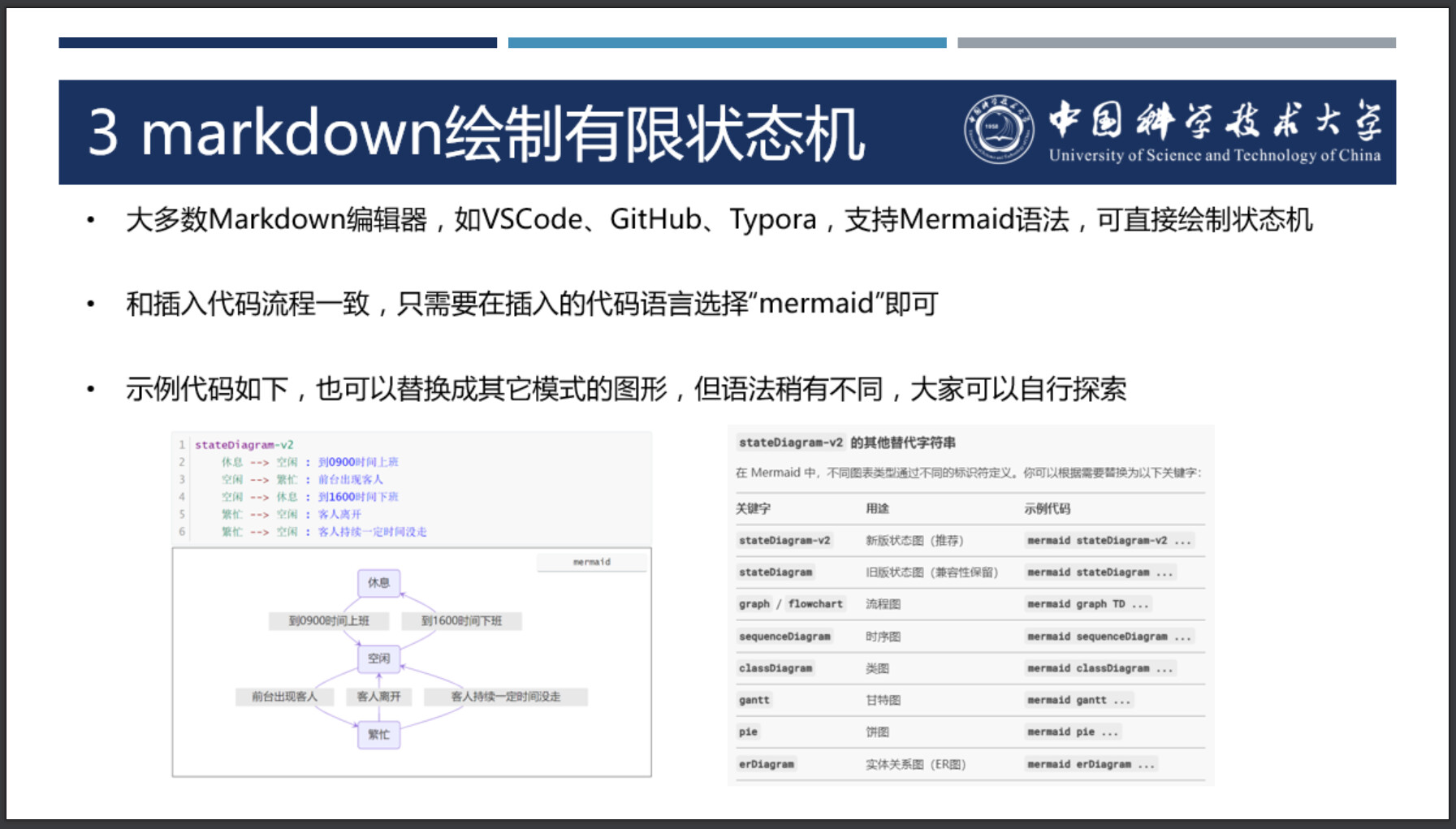
本图片摘自 [1_电控]->[7_发射机构篇]->[2_算法层的有限状态机] 部分
-
-
幽默风趣. 内含适当的网络梗, 可在教学过程中起到活跃气氛的作用
- 本图片摘自 [1_电控]->[2_STM32CubeMX基础]->[4_TIM定时器中断] 部分
- 本图片摘自 [1_电控]->[2_STM32CubeMX基础]->[4_TIM定时器中断] 部分
1.5 未来优化方向
一方面, 本人将持续沿续目录的顺序进行产出. 与此同时, 也将对粉丝们提出的需求以"番外篇"形式进行补充, 如达妙电机控制, Debug方法教学等
2. 开源声明
本开源遵循CC BY-NC ( Creative Commons Attribution-NonCommercial ) 开源协议, 仅限于RoboMaster参赛队之间队内交流使用,最终解释权为中国科学技术大学RoboWalker战队麻治昊所有
3 致谢与参考
- 感谢 中国科学技术大学 RoboWalker战队 一路走来的伙伴们, 感谢中国科学技术大学学生Linux用户协会提供的代码托管平台支持!
- 特别鸣谢 哈尔滨工业大学 ( 威海 ) HERO战队 李赫 同学, 防灾科技学院 思玄战队 赵子淇 同学 对本系列电控教程的批评与指导
- 最后, 附上各大高校的相关开源项目. 我们的Star与Fork便是最大的关注支持与谢意! ( 按参考时间排序 )
- 华南理工大学 华南虎战队 电控开源SRML库
- 吉林大学 TARS_Go战队 电控开源架构
- 防灾科技学院 思玄战队 超级电容功率控制算法
- 湖南大学 跃鹿战队 电控开源架构
- 青岛大学 XRobot战队 电控开源架构
- 哈尔滨工程大学 创梦之翼战队 遥控接收系统使用与维护手册
- 北部湾大学 飞虎战队 DT7的简易修理和校准
- 哈工大威海 HERO战队 李赫同学 机器人学相关的坐标系旋转内容
- 西交利物浦大学 GMaster战队 电机功率模型
- 香港科技大学 ENTERPRIZE战队 功率控制算法