
步兵电控底盘技术报告
一、引言
本文旨在分享普通步兵电控底盘的设计与优化过程,涵盖电控总览、前馈与建模、工程师思维下的底盘调试以及展望与致谢等内容,以期为相关领域提供参考。
二、步兵电控总览
步兵电控系统需满足基本的动、打需求,包括底盘运动学解算、功率控制、小陀螺适配;云台视角转动、小陀螺适配;发射机构连发与热量控制;裁判系统比赛状态参量获取以及操作手遥控器、键鼠操作等功能。而打造优质的步兵电控,还需在细节上深入推敲,核心在于算法与底层逻辑,开发环境和代码架构的选择应以实用为原则。
三、前馈与建模
pid环路图
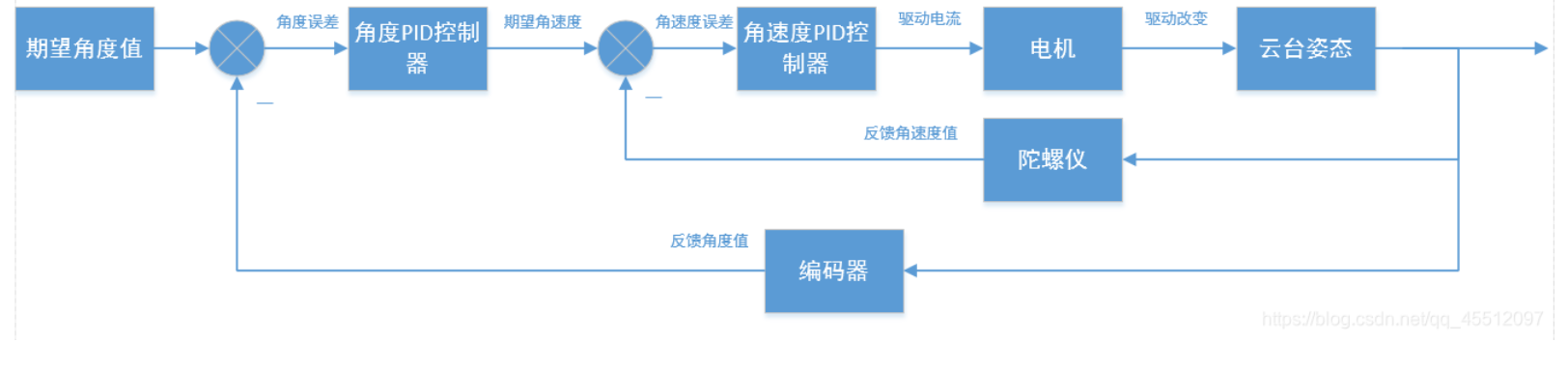
(一)PID控制局限性
过去认为PID参数调整可解决电控问题,但随着实践深入,发现仅靠PID存在不足,前馈与系统建模需综合考量。
(二)积分项问题与重力补偿前馈
以云台控制为例,角度 - 角速度 - 扭矩双环 PID 控制中,当云台俯仰电机目标角度固定时,积分项主要源于俯仰轴机构对电机施加的重力矩,由此引出重力补偿前馈概念,基于力臂、力矩等原理,后续将通过 B 站视频详细分享。
四、调底盘的工程师思维
力控底盘分析图
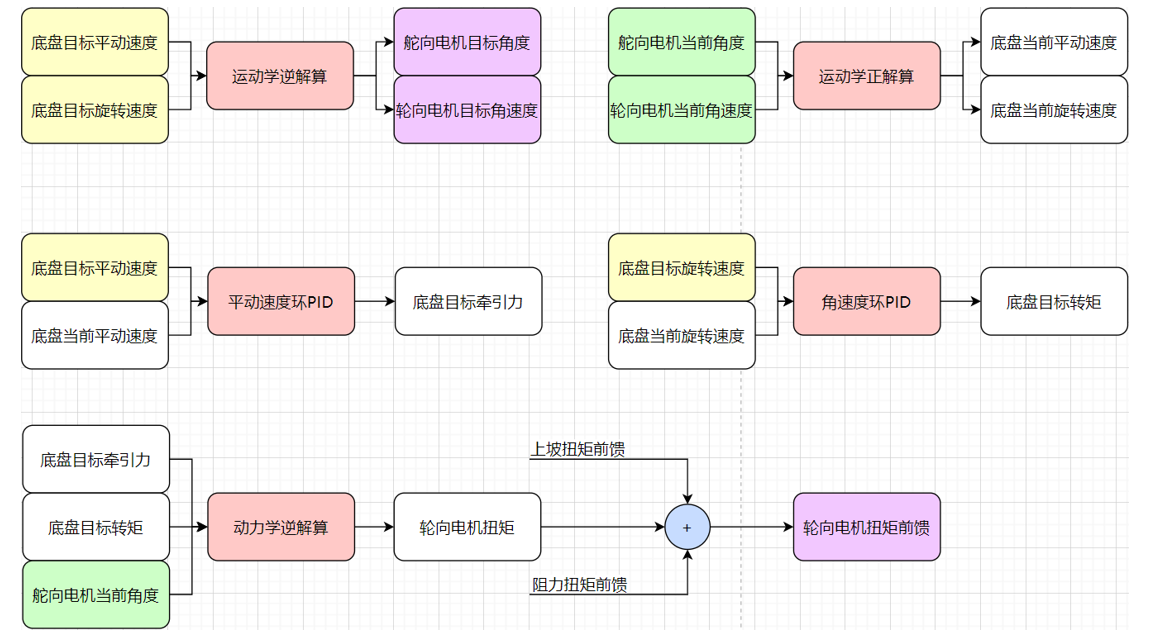
(一)力控底盘
- 问题发现
传统底盘四轮分别速控,理论上纯转动或平动时功率应接近,实际却差异明显,尤其引入功率控制算法后更突出。 - 问题分析
一方面,从轮向电机 PI 控制器积分项分析,其虽能消除稳态误差,但也会与电机机械系统阻力 “斗争”;另一方面,从 error 值分析,当轮组被牵引或牵引其他轮组运行时,error 近乎为 0,控制系统输出维持不变。 - 解决方案
采用力控底盘优化扭矩分配,无需积分项也能更好控制电机,即扭矩前馈。对于不同底盘(舵轮、全向轮、麦轮),扭矩前馈计算方式与速度解算类似。
(二)力补偿前馈
发现底盘上坡骤停、飞坡疲软,阻力较大或不均轮组拖后腿,经分析完善力控底盘,引入上坡扭矩补偿和阻力扭矩补偿建模。
(三)功率控制 - 问题发现
限速虽能实现功率控制,但效果差。 - 问题分析
限速需电流环反应一段时间,延迟大。 - 解决方案
引出限力(限流)功控思路,发现纯 PID 限力仍有改善空间,进一步基于功率建模引入前馈功率思路。
(四)速度规划 - 问题发现
操作手按 WSAD 时,底盘起步刹车闯动大,手感差。 - 问题分析
底盘速度目标值变化剧烈。 - 解决方案
引入斜坡速度规划器。
(五)小陀螺前馈与底盘跟随 - 小陀螺
发现实战底盘正面装甲易被击打,引入猫步;有自瞄时猫步仍易被击打,引入小陀螺;小陀螺行进底盘偏移,分析控制系统延迟及角速度影响,引入小陀螺前馈思路。 - 底盘跟随
发现实战底盘易卡地形,分析空闲时需稳定朝向增大通过性,引入底盘跟随。
(六)各底盘适配算法 - 全向轮与麦轮底盘
发现走偏,分析重心不居中导致滚子打滑,引入纠偏控制算法。 - 舵轮底盘
发现打滑严重,分析换向时舵向电机高速瞬变,引入就近转位算法;高速换向易翻车,分析舵向电机响应过快且无滚子承担打滑,引入虚拟云台机构。
(七)看门狗
看门狗原理图
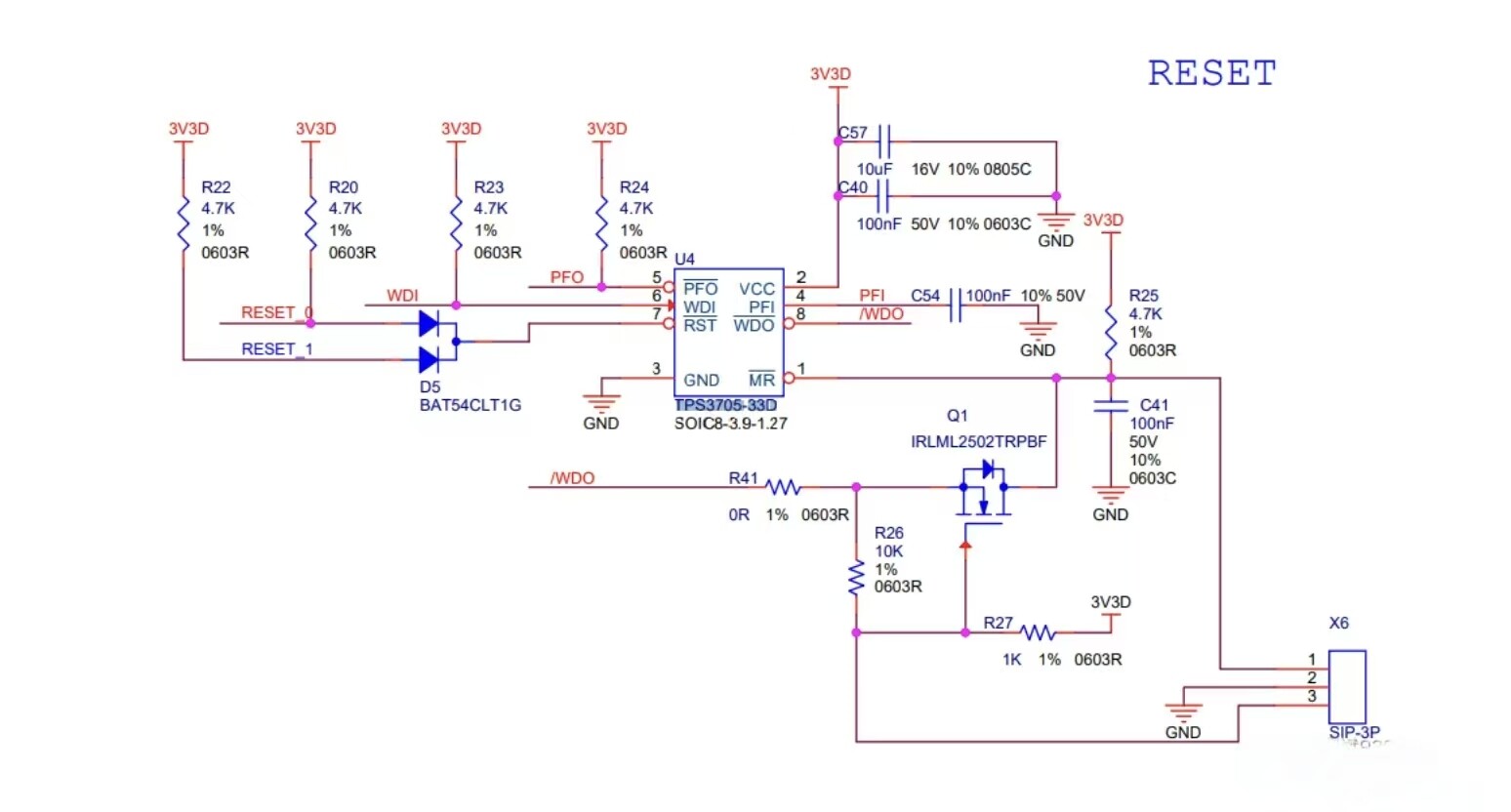
发现单片机长时间运转或静电宕机,分析进入 HardFault,使用看门狗解决