
1.引言
我们24届R1机器人运用了摩擦带发射方案,通过测量得到的整车电流最大能到40多安,功率能到1000W左右,因此我们采取了MP5048芯片的5片并联方案来保证我们整车电源的稳定性。
2.模块介绍
基于MP5048的5片并联方案,输入24-60V,每个MP5048芯片最多可驱动15A连续电流,5片电流能到75A,功率能到1600W左右,具有短路、过流、过温保护,故障信号输出功能。
我们把急停直接接在了MP5048并联板的开关上,用急停开关控制SW引脚,保护整车电源。板子功能是,当后级电路短路或者电机堵转的时候会断电,然后蜂鸣器报警,此功能在比赛中表现比较突出。
3.故障解除
如果MP5048器件设置为锁存关闭模式,可以使用两种方法清除故障。第一,MP5048将保持在故障状态,直到ON引脚的电源先降至低电平再升至高电平,以清除故障并开始SS开启序列。第二,将输入电压(VIN)降预先格式化的文本至3V以下持续100毫秒,以触发VCC电压(VCC)欠压锁定(UVLO)下降阈值。这将导致器件完全复位,并且在VIN上升时会发生插入延迟。在正常运行期间,VIN必须超过5.25V的欠压锁定阈值。
4.电路原理图
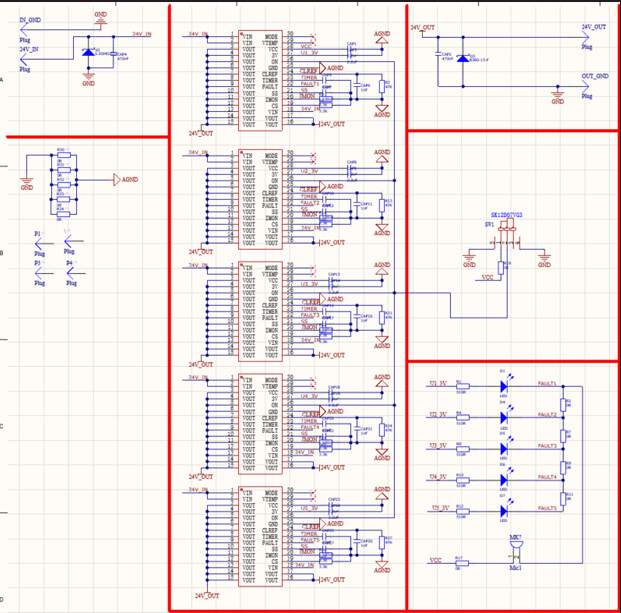
因为5片芯片的fault引脚是连着的,所以只要一个出问题故障灯会亮且蜂鸣器响,若需要判断哪个芯片出问题需要把四个0Ω电阻拆下来,测完一个焊一个,继续测试直至找到出问题的芯片。
5.实物图
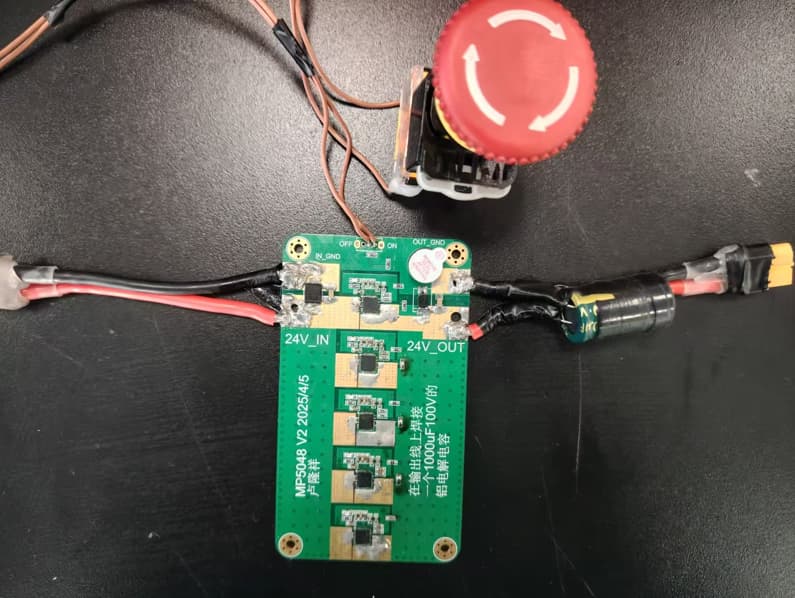
在输出端需要焊接一个1000uF/100V的铝电解电容。
提示:后续可以把接在输出端的TVS管换成肖特基管,因为输出端家肖特基能吸收关断时因寄生电感产生的反向电压尖峰,防止VOUT节点负压,若用TVS达不到这么低的前卫,响应也会较慢,有可能因管脚负压发生损坏。
工程文件:MP5048(5).zip (4.0 MB)