
干货分享
沧溟机器人战队 ▼
青岛理工大学

近日,萝马车圈邀请了来自青岛理工大学的沧溟机器人战队,举办了一场精彩纷呈的技术分享会。沧溟机器人战队在2025ROBOCON(江阴赛区)中荣获季军,展现了卓越的技术实力。
本次分享会,战队为大家带来了定位方案的深度解析,分享了他们在比赛中积累的宝贵经验与创新技术,吸引了众多萝卜坑友们的关注。
设备介绍 ▼

主控设备:nuc11 i7 1165g7 ||主要
3D雷达:livox mid 360 ||主要
2D雷达:lakibeam1
相机:120hz USB相机
主控设备与stm32之间通讯:串口
定位方案 ▼
- 3D雷达方案(最终采用)
- 3D雷达纯里程计方案
- 视觉相机方案
- 2D雷达方案
视觉相机定位方案


2D雷达定位方案
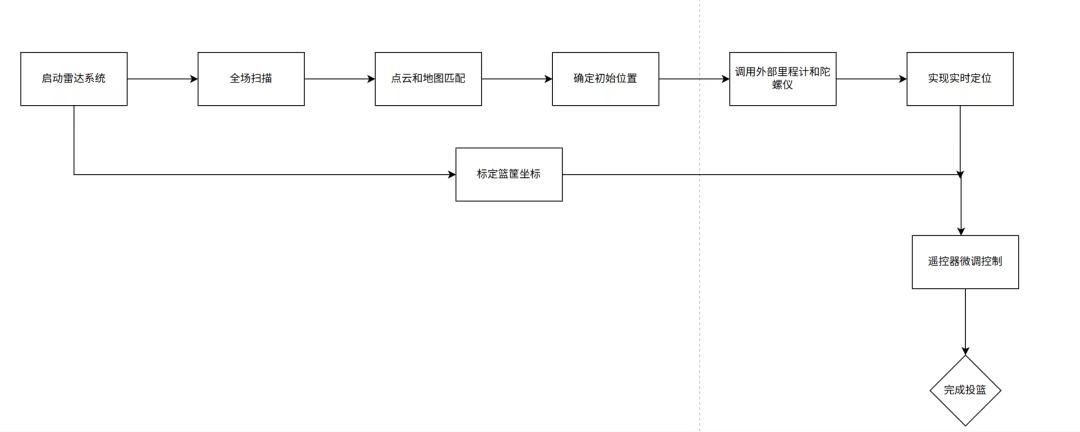
3D雷达定位方案

纯fast_lio里程计的可行性和局限性
可行性:经过大量尝试,如果定位准确,纯雷达里程计的定位效果在比赛时间内误差范围大约2cm-4cm,完全符合投篮时的精度要求,而且依靠算力简单,不容易被对面干扰。
局限性:距离目标点越远时开始启动,yaw轴误差对其影响就越大。我们在启动时进行限位并不能消除其误差,启动icp点云匹配地图,在空旷的场地依旧有较大误差。
3D雷达下俩车通讯传球
工具:无线串口
原理:运用无线串口,实时传输俩车在同一map坐标系下的位置,主控程序一直向底盘发送相对篮筐和另一个车的距离和偏角,可以在比赛时自由选择投篮还是传球。
训练和配合
1.关于到篮筐距离和自身拉簧蓄力长度的函数拟合:
采用从三分线开始,每间隔0.5m进行一次采样,最终拟合出一个二次函数命中率最高;
2.关于雷达坐标与车身坐标的重映射:
让车子原地旋转,读取车子转90°,180°时的坐标变换,对车身坐标进行调整,直到变换控制在3cm以内,这样可以有效解决车子在一个角度投得准另一个角度偏移的问题。
写在最后:
在萝马车圈,我们相信知识的力量,技术的深度,以及分享的温度。如果您想获取本次分享的完整资料,可扫描下方二维码观看本次分享会。

如果想进行更多的互动和讨论,欢迎关注萝马车圈B站账号,也可关注微信公众号,后台留言您的需求,我们将第一时间为您送上所需资源。

同时,我们诚挚地邀请您成为这个知识共享社区的一部分。无论您是技术大咖还是行业新手,只要您怀揣着对知识的热爱和对创新的追求,我们都欢迎您的投稿。
