这里转载一下之前在其他地方写的一个总结:地址
最近在研究如何使用u3d进行ROS2机器人的仿真。
现在在这里总结一下一些可能会用到的资源,为大家做一个参考!
我也会写一些blog,同时本贴也会不定时更新
好啦,下面是正文
- Unity安装相关
-
Unity的版本不要选择旧版本,但是不要选择过新的版本。经过测试2023版本的Unity是打不开官方教程的。咱现在用的是2020.3。
-
Unity的官网是https://unity.com
- ROS例程
- Unity Robotics 同时支持ROS以及ROS2。经过测试,可以在ROS2 humble上使用。
- 机械臂仿真例程:GitHub - Unity-Technologies/Unity-Robotics-Hub: Central repository for tools, tutorials, resources, and documentation for robotics simulation in Unity. 学习里面的“Pick-and-Place Tutorial”就好。
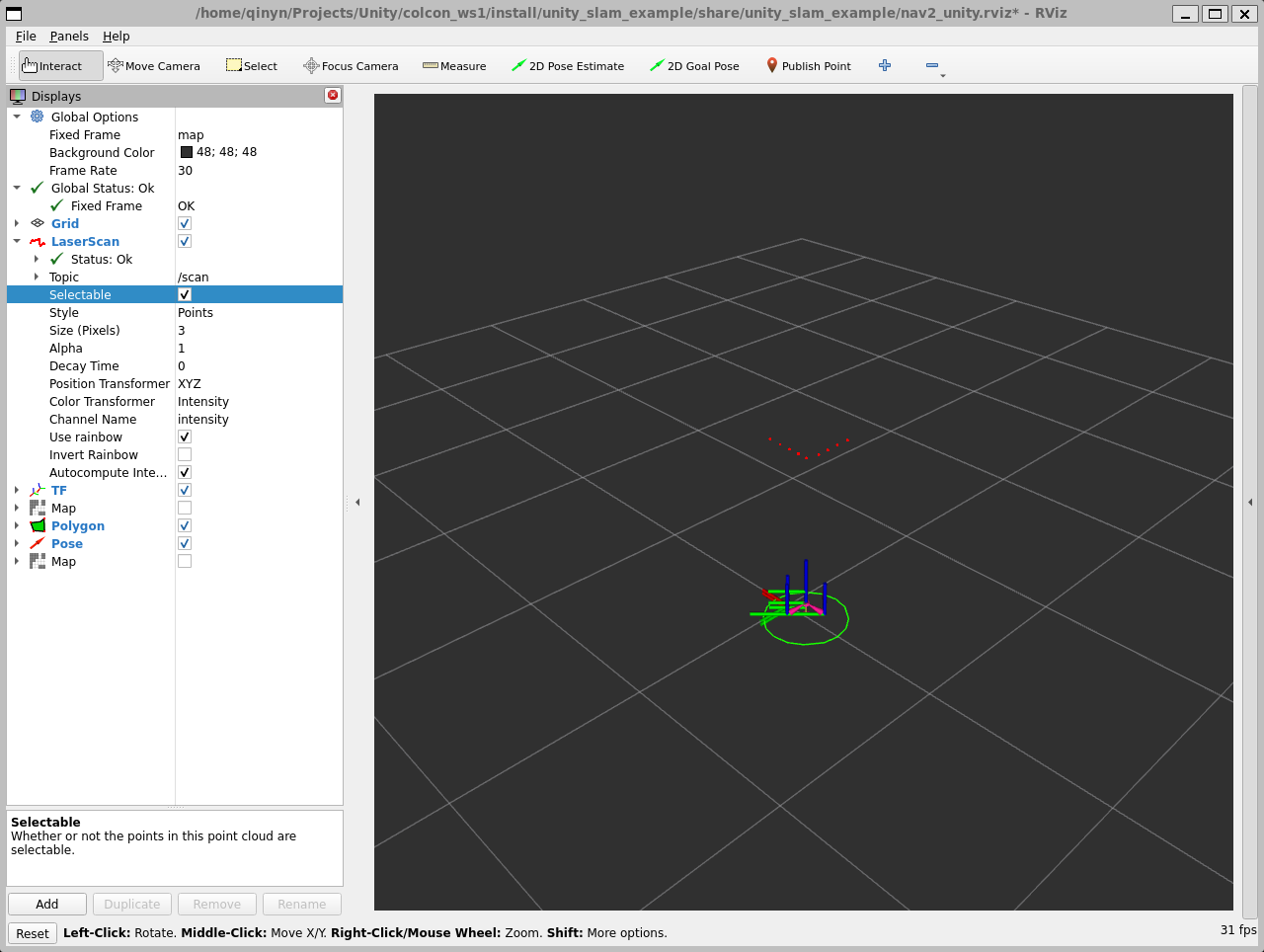
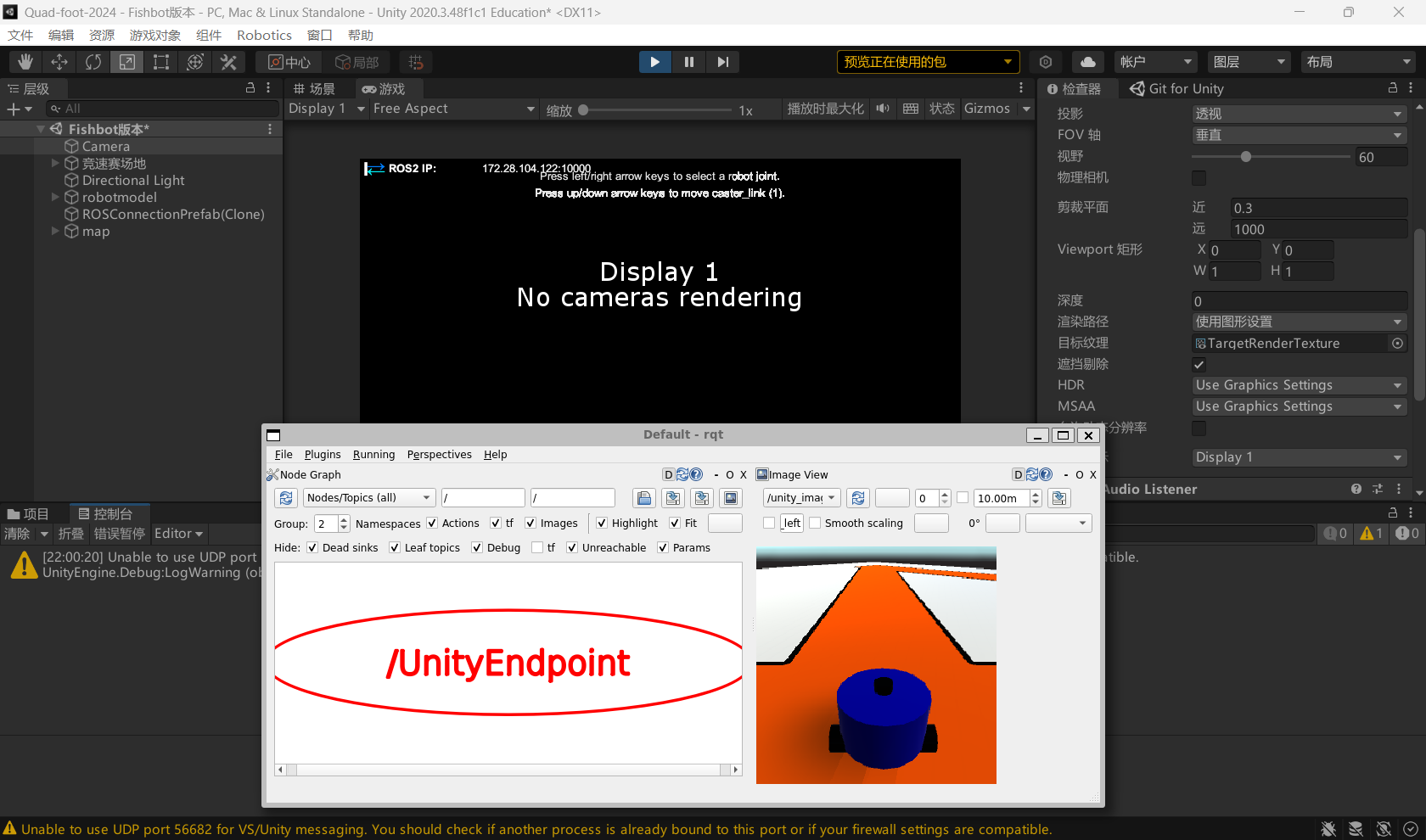
- SLAM 建模例程:GitHub - Unity-Technologies/Robotics-Nav2-SLAM-Example: An example project which contains the Unity components necessary to complete Navigation2's SLAM tutorial with a Turtlebot3, using a custom Unity environment in place of Gazebo. 根据Setup Instructions一步步操作就好。
- 资源
- ROS包:GitHub - Unity-Technologies/ROS-TCP-Endpoint: ROS package used to create an endpoint to accept ROS messages sent from a Unity scene using the ROS TCP Connector scripts 该包用于Unity和ROS之间的通信
- Unity包:GitHub - Unity-Technologies/ROS-TCP-Connector 该包向Unity提供了ROS接口,并能够生成srv和msg。
- Unity包:GitHub - Unity-Technologies/URDF-Importer: URDF importer 该包用于将URDF模型导入
- 常见问题
有待整理
P.S. 附上部分咱正在进行的work截图