
萝马干饭
中国科学技术大学RoboWalker
高性能飞镖系统的设计与实现
近日,萝马车圈特邀在2025 RoboMaster全国赛中夺得亚军 的中国科学技术大学RoboWalker战队,就弹射镖架机械设计、机械镖体外形设计以及镖架电控及视觉等方面 进行思路分享,吸引了众多参赛队伍的广泛关注。
一、弹射镖架机械设计
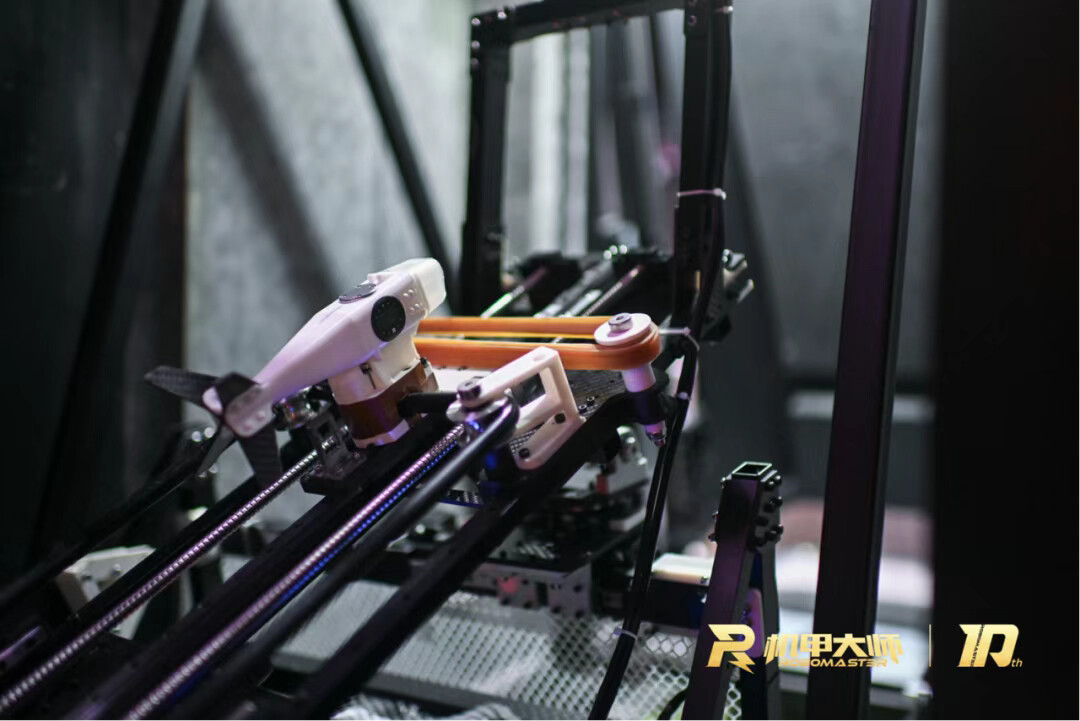
— 弹射蓄力机构整体设计 —
-采用16mm直径粗皮筋作为飞镖系统动力源
-M2006驱动的丝杆作为控力系统
-环状皮筋用于滑台的两级缓冲
-钢滑轨用于提供加速轨道
-无人机脱钩器用作扳机

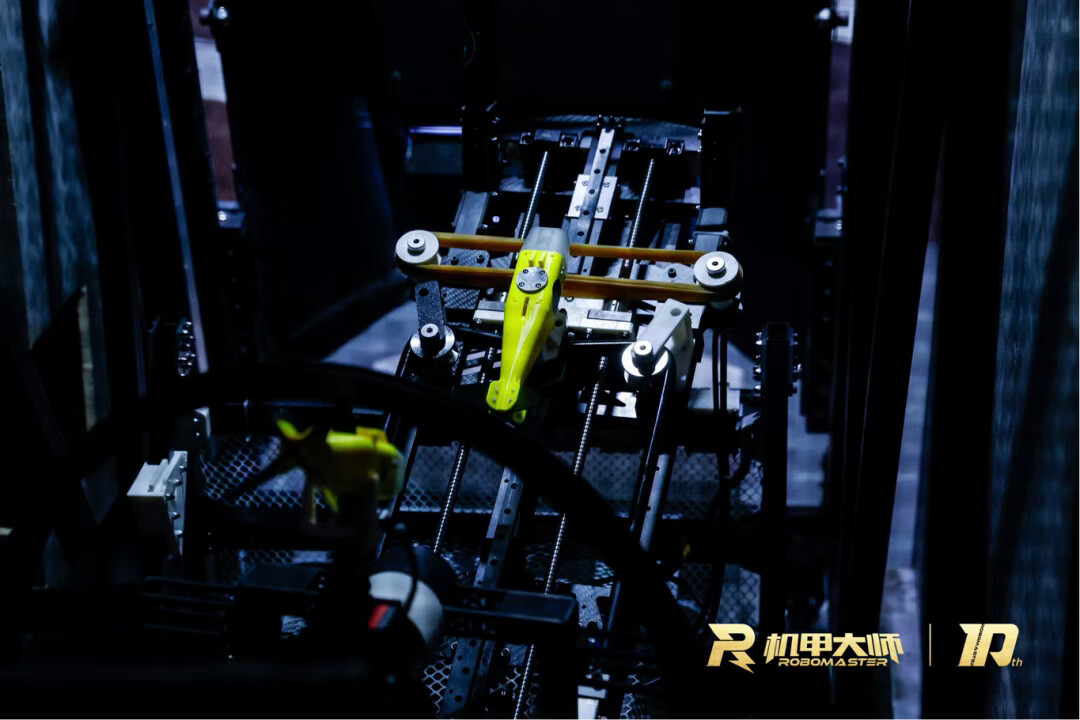
— 双丝杆蓄力系统 —
·在前半段赛季 ,我们采用了大减速比电机配合同步带蓄力的方案 ,此方案有如下缺陷:
-同步带在大量测试后可能发生断裂,更换相对困难
-同步带摩擦会造成一定的扭矩损耗,且受制于电机性能不得不牺牲蓄力速度,每次打开舱门只能发射两发飞镖
·区域赛后 ,为了尽量避免国赛新规则下飞镖伤害的削弱、实现一轮发射四发的目标,我们在新镖架上采用了双电机驱动双丝杆的新方案 :
-经过对电机扭矩、最大转速、丝杆传动比、蓄力时间等参数的计算,理论验证了其高速蓄力的可行性
-经过对电机控制、自瞄速度、自动控力速度以及发射流程的优化,赛场上每轮全弹发射时间不超过18s
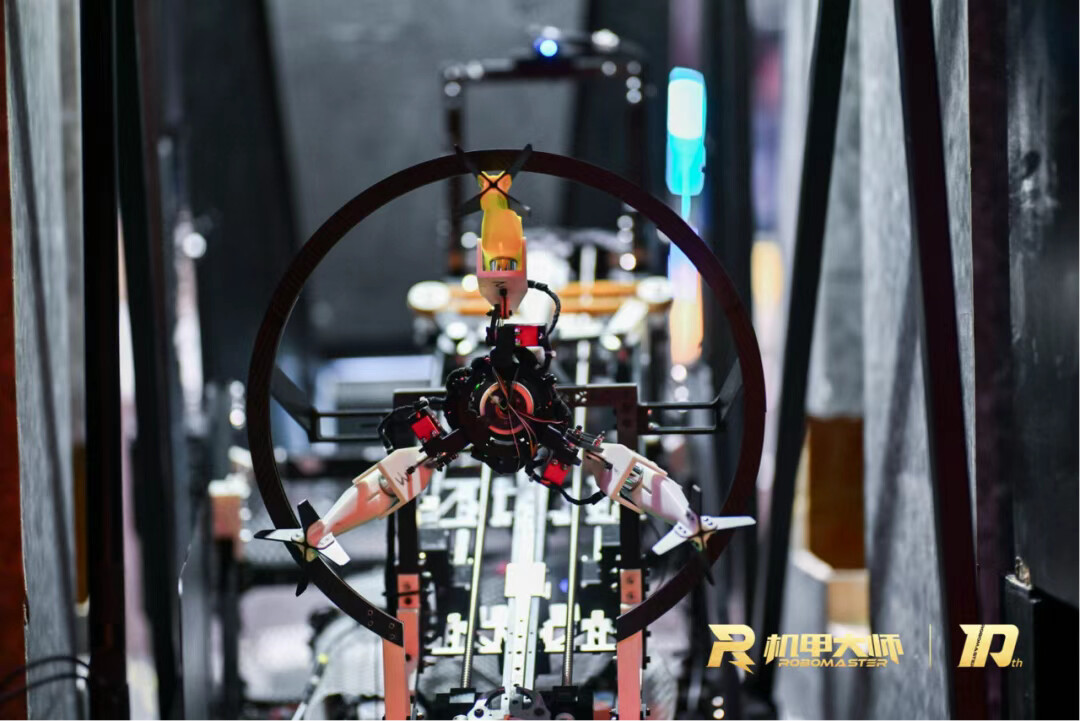
— 供镖系统设计 —
我们整体上采用了常见的转轮式供镖机构:
-供镖臂采用舵机驱动的平行连杆结构,简单高效
-末端使用电磁铁对镖体进行吸附与固定、定位,配合镖体上内嵌的铁片,通过继电器控制吸取/释放,极大提高了夹爪的泛用性
-外围使用碳板圆环进行保护与限位
— 一些细节与小巧思 —
-我们的Yaw轴丝杆只有横梁右边一半长度,发射层向右偏置,减小了重量,避免了结构冗余
-左侧纵梁内部空间设置了遥控器专用挂钩,避免在频繁搬运镖架时磕碰损坏遥控器
-前后各有一对把手方便搬运
-正面及核心电路区域使用塑料网包覆以抵挡弹丸
-全部电路走线使用布基胶带缠绕保护,无外露线缆

二、机械镖体外形设计
— 机械镖体外形设计 —
我们的机械镖体参考了其他学校的开源与航空炸弹的外形设计,整体为水滴状的流线型设计:
-我们采用了约35°后掠角的碳纤维尾翼,轻量化的同时提高了耐用度
-顶部有铁片及定位槽,与供镖系统夹爪相配合
-底部有挂钩及定位柱,与发射滑台相配合

— 飞镖系统整体核心设计思路 —
飞镖系统的准确度由镖架与镖体各自决定一部分:
-镖架负责为镖体提供稳定的出膛速度大小与方向,需要通过蓄力机构的闭环控制实现速度大小的恒定、通过一系列的机械限位控制方向的稳定
-镖体需要依靠自身的气动外形维持稳定、均一的弹道,便于镖架进行参数标定与调整

三、镖架电控及视觉
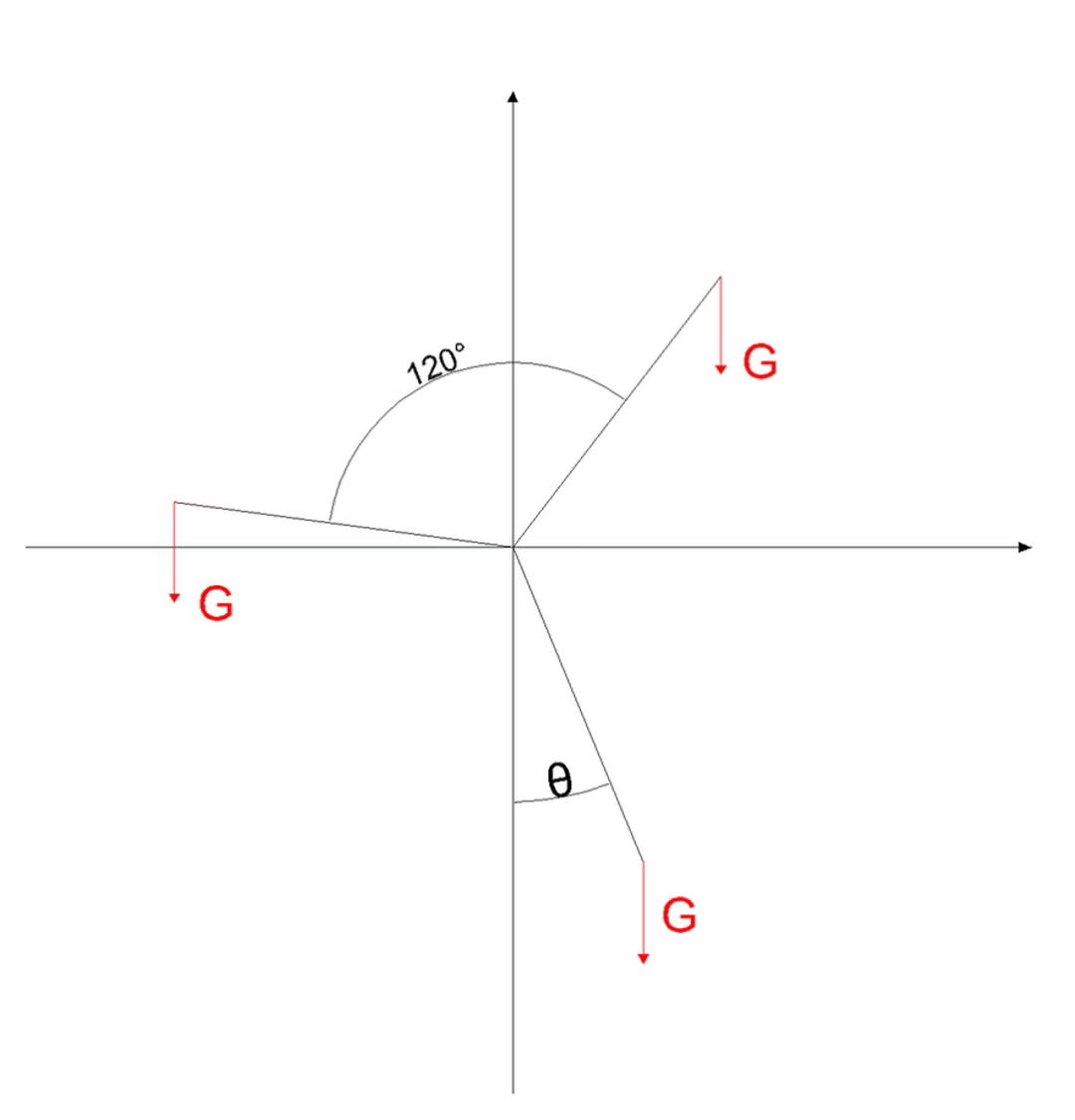
— 镖架电控 转轮的重力补偿 —
-由于镖体外撇挂载,我们的供镖转轮具有较大的转动惯量。因此我们使用了重力补偿配合电机MIT控制
-系统的受力结构如右图,通过计算出重力矩并作为前馈项输入电机,可以实现供镖的快速性与精确性
— 镖架视觉 —
我们采用了简单的传统视觉方案,上位机PC在特定曝光参数下对特定色块进行识别,配合下位机进行闭环控制。有以下值得注意的细节:
-比赛场地中可能有白光源,若直接在RGB空间内进行颜色分割会将白光误识别,需要将颜色空间转换为HSV空间。
-赛场上其他机器人的灯条、场地边的安全出口等都可能为绿色,需要对识别到的色块进行圆形度检查以杜绝误识别。
结语
飞镖系统的精进依赖于大量的测试、数据的收集与经验的积累。除了技术的研发,测试投入的大量时间也不可忽略。
祝各位都能百发百中!

写在最后:
在萝马车圈,我们相信知识的力量,技术的深度,以及分享的温度。如果您想获取本次分享的完整资料,可扫描下方二维码观看本次分享会。
如果想进行更多的互动和讨论,欢迎关注萝马车圈B站账号,也可关注微信公众号,后台留言您的需求,我们将第一时间为您送上所需资源。