
一、安装FAST-LIVO2
1. 安装ROS2
建议打开终端,使用鱼香ROS一键安装:
wget http://fishros.com/install -O fishros && . fishros
2. 安装PCL & & Eigen
2.1 安装PCL
2.1.1 正常安装流程
打开终端,输入下述代码:
sudo apt install libpcl-dev pcl-tools
sudo apt install ros-你的ROS版本代号-pcl*
2.1.2 安装中遇到的问题
如果遇到下载失败或者无法找到版本,请考虑换源。
我遇到的问题是ROS2-humble-pcl无法下载(清华源),换成阿里源解决问题。解决方案如下:
打开终端输入:
sudo gedit /etc/apt/sources.list
sources.list文件增加下述代码:
deb https://mirrors.aliyun.com/ros2/ubuntu/ jammy main
然后再在终端中输入下述指令,信任 ROS 的 GPG Key,并更新索引:
sudo apt install curl gnupg2
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
2.2 安装Eigen3
2.2.1 正常安装流程
打开终端输入下述指令:
sudo apt install libeigen3-dev
使用apt安装会默认安装到/usr/local/include
2.2.2 安装中遇到的问题(可能)
如果有编程软件提示 #include < Eigen>报错(不一定是本项目,因为之前作者运行其他一些项目中遇到过该问题),则有可能是库的安装位置存在问题,在作者这台电脑中将 #include <Eigen/Dense>改成 #include <eigen3/Eigen/Dense>即可解决问题。
如果想一劳永逸,将Eigen重新软链接或者移动位置即可。
sudo ln -s /usr/local/include/eigen3/Eigen /usr/local/include
或者
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
3. 安装livox_ros_driver2 && FAST-LIVO2
3.1 安装livox_ros_driver2
参考《【Livox】安装Livox-ros-driver2》
3.2 安装Fast-Livo2
3.3 修改Fast-Livo2配置文件
3.4 遇到问题
3.4.1
3.4.2 编译失败
去检查报错信息,如果按照前面教程做的话不应该存在这个问题。如果说存在编译报错,且依赖已全部安装。建议将livox_ros_driver2以及FAST-LIVO2所有文件删除,然后重新按照本教程中的 3. 安装livox_ros_driver2 && FAST-LIVO2 重新下载并编译。(我就是被这个问题折磨了半个小时)。
4. 编写一键启动脚本
打开终端输入下述指令:
touch ros2_fastlio2_lanch.sh
vim ros2_fastlio2_lanch.sh
ros2_fastlio2_lanch.sh:
5. 如何保存pcd文件
很蛋疼的一点就是Fast-Livo2必须手动保存。默认是开启保存pcd文件的。但必须手动触发。在终端中输入下述代码:
rqt
打开rqt界面,如下图所示
点击图窗中的
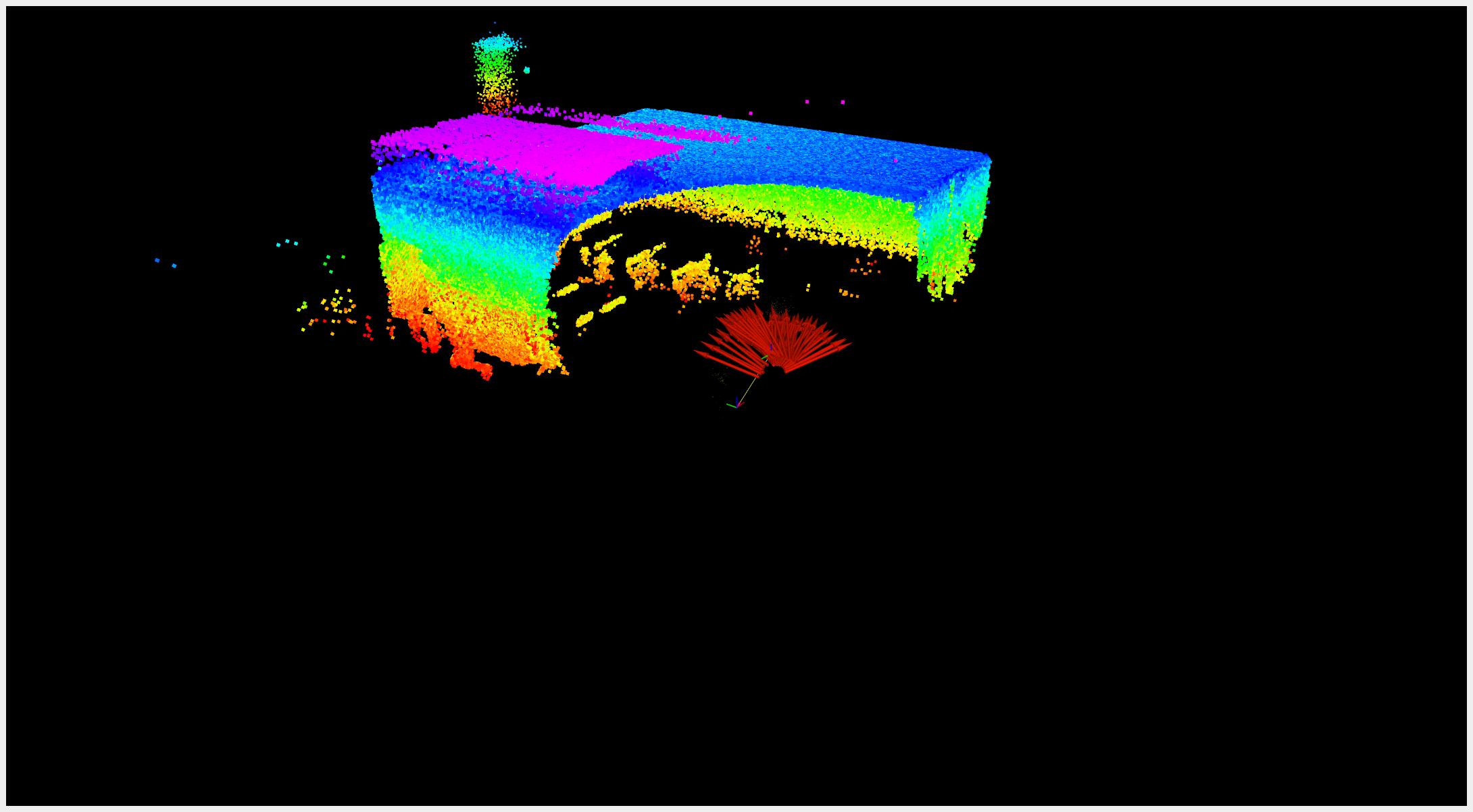
二、运行结果
三、参考链接如下
FAST-LIVO2
阿里云开发者社区–ros2镜像
鱼香ROS社区–小鱼的一键安装系列
《【Livox】安装Livox-ros-driver2》
四、 说明
没更新完,只是把坑写了一下,等过几天搓一搓