
开源链接
LIBDRV v1.0 无刷电机驱动器 - 立创开源硬件平台
一.项目简介
LIBDRV项目针对全国大学生机器人大赛的场景开发,旨在为众多新生的队伍提供性价比高、使用简单的无刷电机驱动,帮助队伍完成基本参赛任务,降低参与比赛的资金以及技术门槛。本项目中的驱动板适用于摩擦带、摩擦轮、涵道等载荷上的电机驱动,可以在某些应用中取代大疆的C620/C610驱动器,降低整车的成本。
二.接口
| 名称 | 描述 |
|---|---|
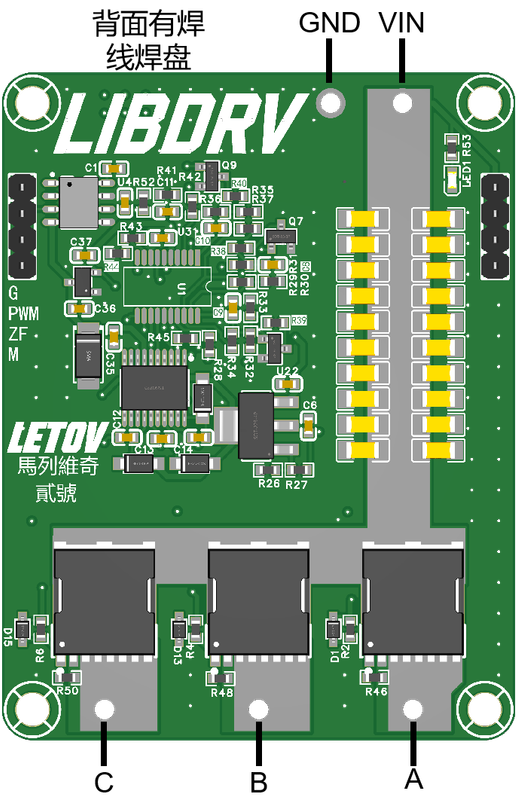
| VIN | 电源输入,连接24V电池 |
| GND | 电源负极/信号地 |
| PWM/SP | 调速接口,输入3.3V、10kHz的PWM信号进行调速,占空比越大,电机转速越快 |
| ZF | 方向调整接口,默认拉低,拉高可改变电机旋转方向 |
| M | 换相信号输出,可读取电机转速,转速=频率/电机线圈数量 |
| A/B/C | 接无刷电机三相线,交换任意两根线的连接可改变电机旋转方向 |
三.模块参数
- 输入电压22-26V;
- 目前测试连续母线电流可达30A,40A时触发过流保护,可通过更改电阻R1的大小来进行更改。
四.注意事项
1.电机适配
LIBDRV采用全硬件架构,需要调整板上部分容阻值来对不同的电机及应用场景进行适配,适配方法如下。
启动力矩设置
启动力矩由板上的R43、R44分压决定,建议通过改动R44来进行调节。启动力矩电压范围0-2V,电压越大,启动时力矩越大。如果输入信号电机难以转动说明启动力矩太小,如果启动时电机出现明显反转则说明启动力矩过大。建议力矩从小往大进行调节。
反电动势电容调节
板上C8、C9、C10为反电动势电容。电机的KV值越低容量越大,KV值越高电容量越小。对于3058、5065等电机,使用1uF电容较佳。一般在选择时会选择偏大的电容,但一般大小不超过1uF。电容太大或者太小可能会导致电机启动困难甚至失败。
角度电阻调节
板上R38、R39、R40为角度电阻。如果出现电机加速过程中突然停止或者重启,说明角度电阻太小。如果出现PWM输入占空比升高,但电机转速提高与电流增大呈严重的非正比关系,说明角度电阻太大。建议角度电阻从小往大进行调节。
2.输入电容
板上默认输入电容为200uF,如果在更大的功率下使用,建议按照2uF/W的标准增大输入电容。开源外壳可以支持在板背面焊接一个2200uF/50V的高频铝电解电容
3.芯片购买
JY02A芯片有三种版本,分别对应不同的缓启动速度:JY02A(461E001B)缓启1S、JY02A(46207733)标准型缓启3S、JY02A(4627E0C9)缓启10S。对于摩擦轮、摩擦带等应用场景,建议使用3S缓启动的版本,需要降低启动电流可以考虑使用10s缓启动的版本。JY02A在淘宝上的授权经销商较多,主要发货地为上海和河南,可以按自己的收货地选择,实测在广东上海发货物流较快。
4.外壳使用
附件中含有LIBDRV的外壳文件,使用SketchUP绘制,如果用solidwork改图可能需要进行格式转换。安装时配合较紧。外壳底部开槽用于扎带固定电调、同时凸台上有螺丝孔进行固定。
五.联系作者
如果对本项目有任何疑问或遇到任何问题,欢迎来联系作者
也欢迎加入华南理工大学RobotIC实验室QQ交流群进行交流
群号:787601544
