
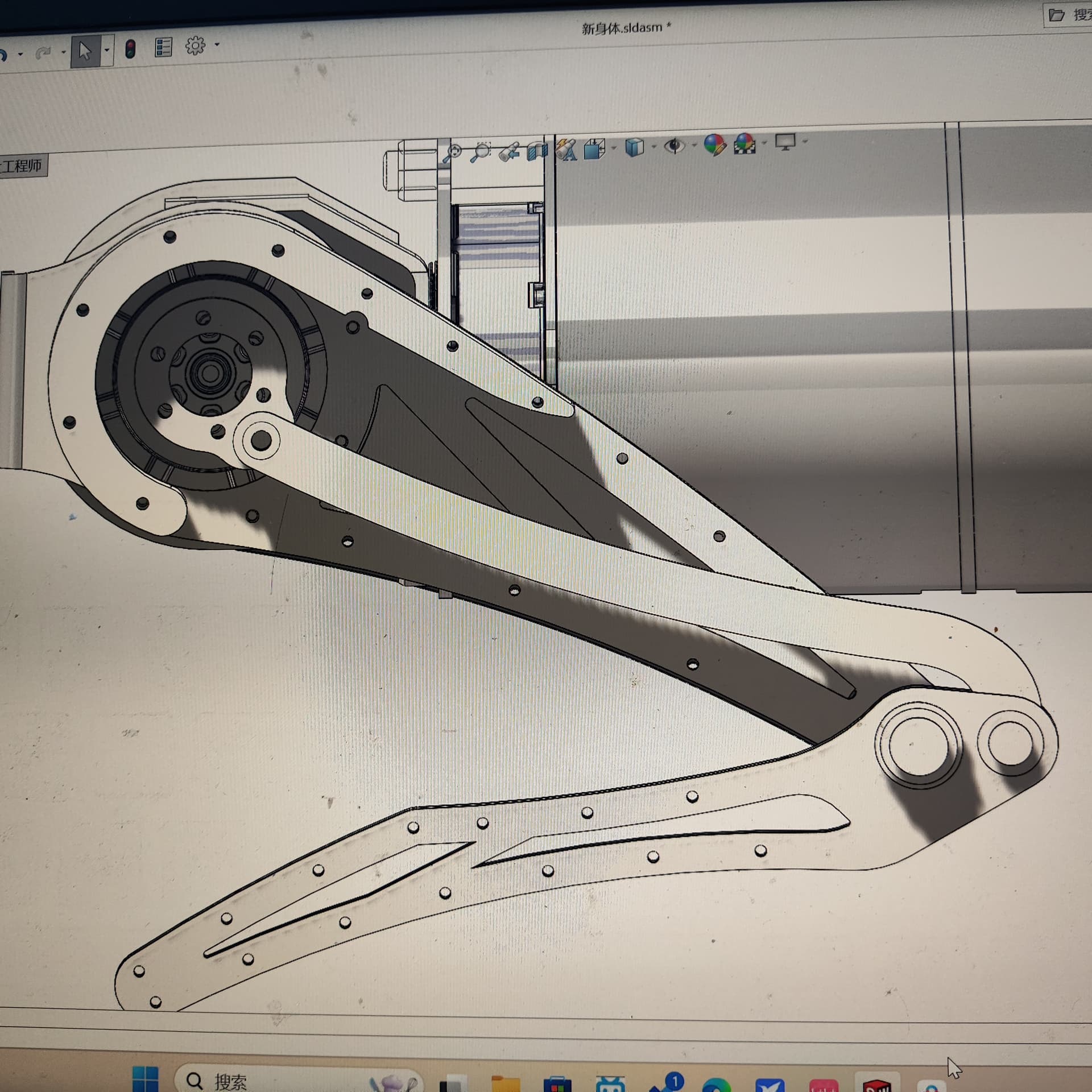
想把机械狗升级一下,学长因为腿足比例问题失败了,电机根本使不上力,现在到我了 ![]()
3 个赞
顶一个,看看有无大佬开源
2 个赞
还想问问,在大腿和小腿之间是靠连杆机构好还是靠同步带好一点?
1 个赞
连杆一般稳一些
2 个赞
推荐连杆
2 个赞
可参考:MIT Cheetah猎豹机械狗模型.7z 百度网盘 请输入提取码
但是为同步带方案。
5 个赞
谢谢大佬
1 个赞
谢谢大佬 ![]()
学长做出来的机械狗疑似压力角太大,所以使不上劲,实验室完全没做过十二自由度的,一点技术积累都没有,只能仰仗各位大佬能在这方面提出的意见了 ![]()
1 个赞
电机选型是?感觉这个设计对电机压力有点大
1 个赞
把这个借鉴过来 ![]()
【宇树 Go1 机器狗 拆机 腿部 结构 内部 揭秘 #机器狗拆机】 宇树 Go1 机器狗 拆机 腿部 结构 内部 揭秘 #机器狗拆机_哔哩哔哩_bilibili
2 个赞
宇树电机,确实是,电机使不上劲,有的时候根本站不起来 ![]()
建议用平行四连杆,这杆子不要有歪曲的形状,尽量只承当拉力和压力
1 个赞
感谢大佬的意见
感谢分享
个人来说感觉连杆好一点,只不过需要注意限位,连杆强度不够最后可能会导致电机失控时候被打断了。我们是碳板之前被打爆过一次。
3 个赞
大佬解决了吗?我们也打算用宇树做十二自由度的狗,想请教一点经验